Overview
The high financial burden of commercial mobile manipulation robots significantly limits research in real-world scenarios. To address this issue, we propose AhaRobot, a low-cost and fully open-source dual-arm mobile manipulation robot system with hardware only $1,000 (excluding optional computational resources), which is less than 1/15 the price of popular robots. The AhaRobot system consists of three components: (1) a novel low-cost hardware architecture primarily composed of off-the-shelf components, (2) an optimized control solution to enhance operational precision, integrating dual-motor backlash control and static friction compensation, and (3) a simple teleoperation method RoboPilot. We use handles to control the dual arms and pedals for whole-body movement. The teleoperation process is low-burden and easy to operate, much like piloting. RoboPilot is designed for remote data collection in embodied scenarios. Experimental results demonstrate that RoboPilot significantly enhances data collection efficiency in complex manipulation tasks, achieving a 30% increase compared to methods using 3D mouse and leader-follower systems. It also excels at completing extremely long-horizon tasks in one go. Furthermore, AhaRobot can be used to learn end-to-end policies and autonomously perform complex tasks, such as pen insertion. We aim to build an affordable yet powerful platform to promote the development of embodied tasks on real devices, advancing more robust and reliable embodied AI.
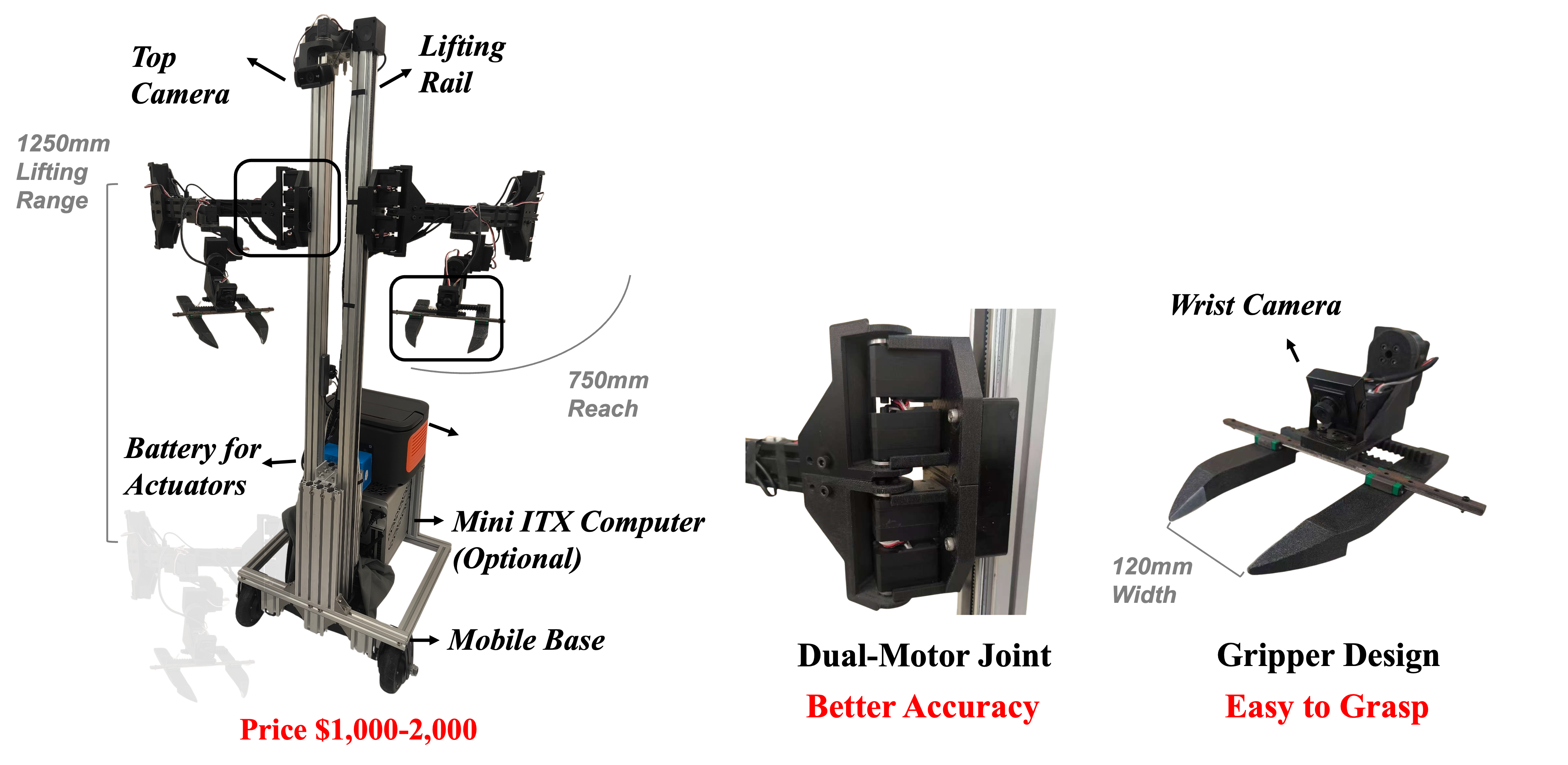
AhaRobot leads a new direction in robotics research with its cost-effective design. With just $1,000-2,000 in hardware, it achieves flexible autonomous control capabilities, which is only 1/15 of the price of mainstream commercial solutions. This design not only enables more researchers to participate in embodied AI research but also lays the foundation for the popularization of future home service robots.
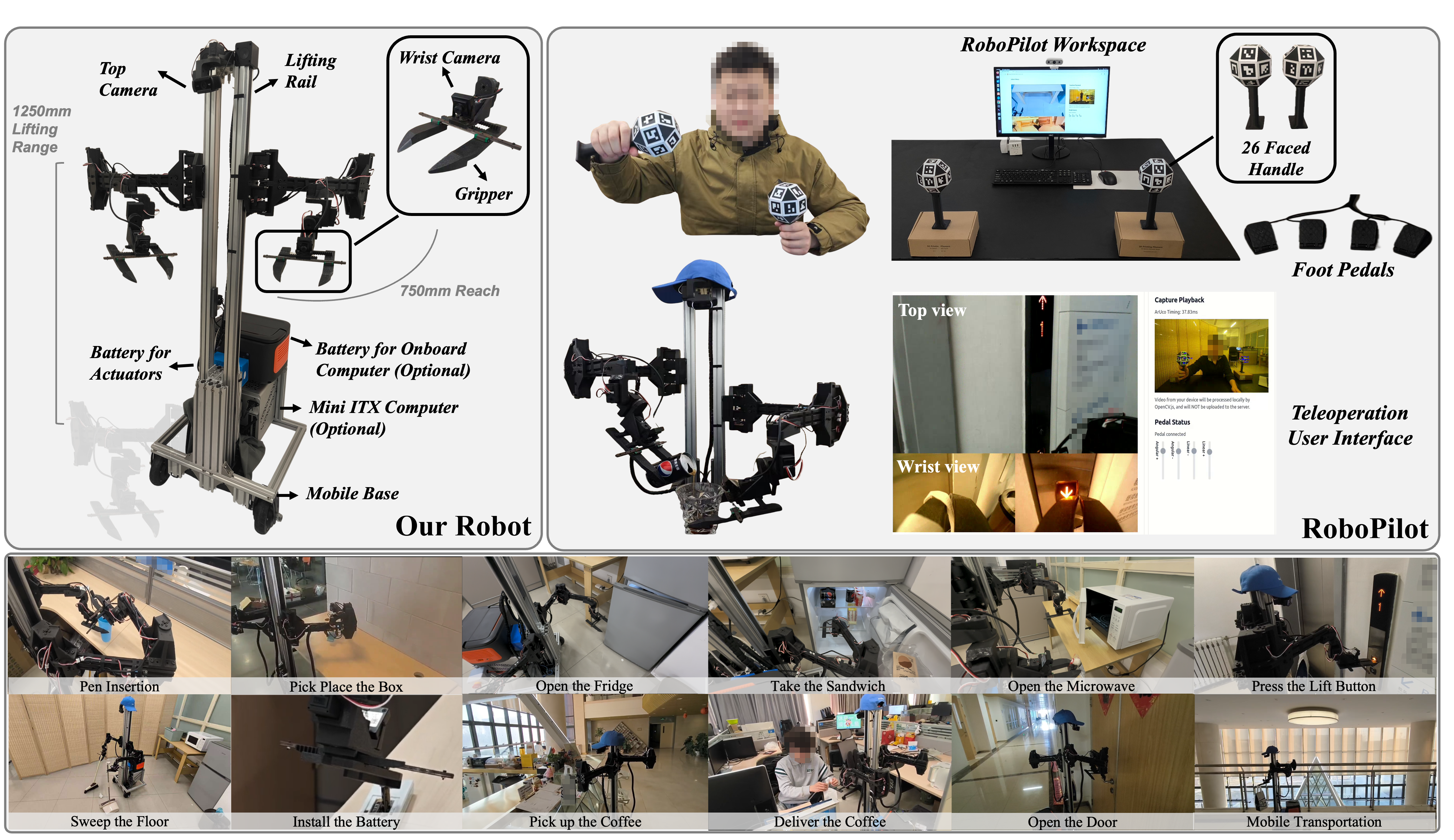
As shown in the figure, AhaRobot consists of three core components: (1) Low-Cost Hardware: primarily composed of off-the-shelf components, including dual-arm system, mobile base, vision system, and computing unit, with a total of only $1,000-2,000; (2) Dual-Joint Control Method: an optimized control solution that integrates dual-motor backlash control and static friction compensation to significantly enhance operational precision; (3) RoboPilot Teleoperation: a simple remote teleoperation method using handles to control the dual arms and pedals for whole-body movement, making it low-burden and easy to operate, much like piloting.
Overview
| Robot Platform | Cost | Dual Arm | Mobile Base | Reach Floor | Hardware Open-Source | DoF |
|---|---|---|---|---|---|---|
| Mobile Aloha [9] | $32,000 | ✓ | ✓ | ✗ | ✓ | 16 |
| Hello Robot [19] | $24,950 | ✗ | ✓ | ✓ | ✗ | 7 |
| DROID [20] | ≈ $27,000 | ✗ | ✗ | ✗ | ✗ | 8 |
| AgileX COBOT | ≈ $30,000 | ✓ | ✓ | ✗ | ✗ | 16 |
| Reachy | ≈ $75,000 | ✓ | ✓ | ✗ | ✓ | 19 |
| TIAGo | > $200,000 | ✗ | ✓ | ✗ | ✗ | 11 |
| AhaRobot | $1,000-2,000 | ✓ | ✓ | ✓ | ✓ | 16 |
The price of $1000 does not include computing resources, while $2000 version is for the Mini-ITX computer with an RTX4060 GPU.
We put the arm horizontally to counter gravity, provide lifting ability, and reduce the cost
| Category | Value |
|---|---|
| Payload (Single Arm) | 1.5 kg |
| Weight | 51 kg |
| Size | 550×500×1550 mm |
| Max Gripper Width | 120 mm |
| Max Reach (X-Y Plane) | 750 mm |
| Z-Axis Reach | 1250 mm |
| Battery Life | 4-5 hr |
| Min Turning Radius | 0 |
| Turning Sweeping Radius | 500 mm |
| Component | Unit Price ($) | Quantity | Total Price ($) |
|---|---|---|---|
| Hardware | |||
| Feetech STS3215 Servo | 15.3 | 26 | 397.2 |
| ESP32 Controller for Feetech Servo | 11.1 | 3 | 33.3 |
| Sukai Synchronous Belt Slide, 57120 Stepper Motor | 88.9 | 2 | 177.8 |
| 139 BLDC Motor | 30.6 | 2 | 61.2 |
| 1080P USB Camera | 16.8 | 2 | 33.6 |
| Logitech C920 Pro USB Camera | 69.4 | 1 | 69.4 |
| Li-Poly Battery 24V 20000mAh w/ 3A Charger | 53.6 | 1 | 53.6 |
| Subtotal (Hardware Only) | 826.1 | ||
| Compute Resource (Optional) | |||
| Jackery 600 Plus 220V 800W Battery | 291.5 | 1 | 291.5 |
| Mini ITX Computer with RTX 4060 | 833.2 | 1 | 833.2 |
| Total (Including Compute Resources) | 1950.8 | ||
See our tutorial for the complete price list and purchase links.
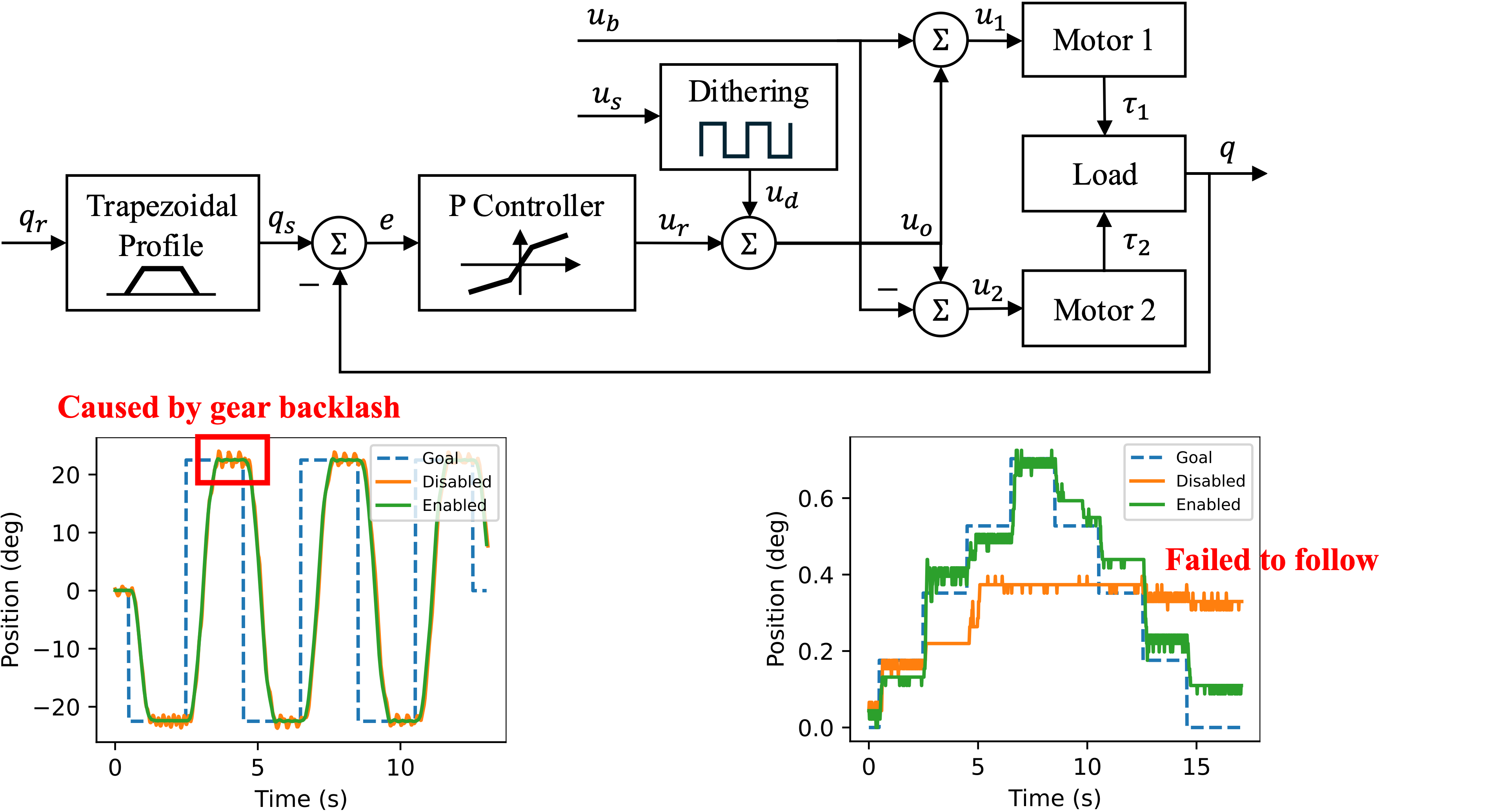
We introduce Dual-Joint Control System to further enhance robot control precision
Experimental results demonstrate that our design can achieve more stable tracking of various waveforms
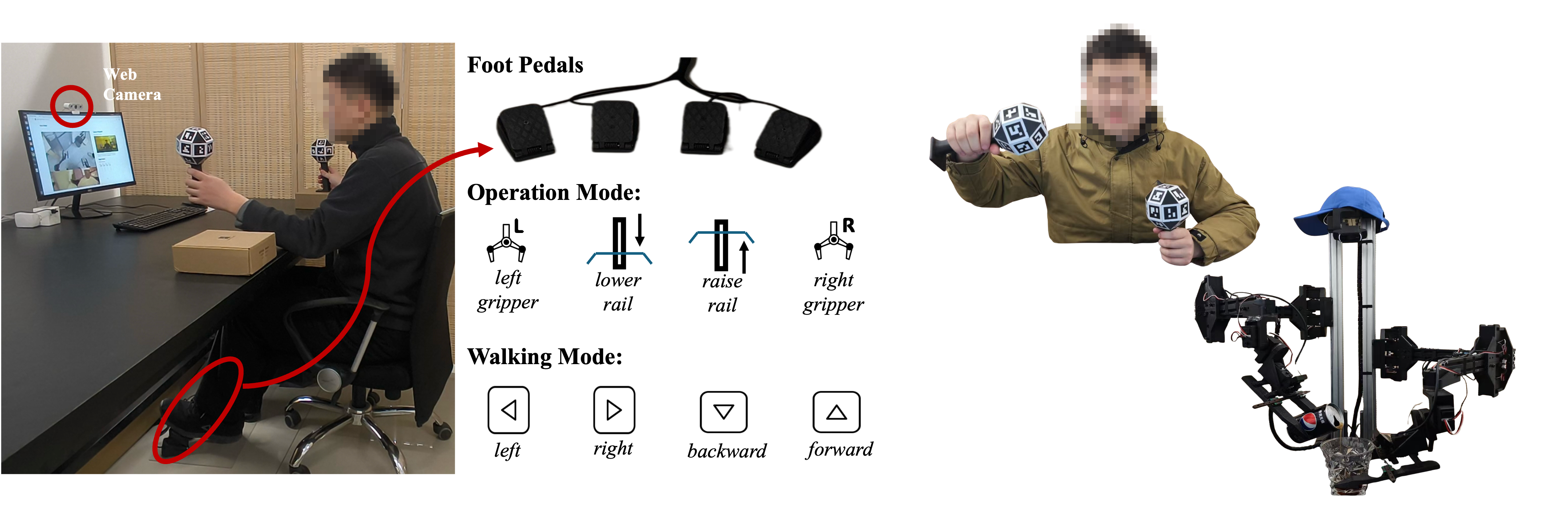
Web-Based Teleopration Workstation anyone can easily set up at a dinner table
Delivering the Coffee (Long Task)
Picking and Heating the Sushi (Long Task)
Pick up the Box (50 Demos)
Collect the Toys (80 Demos)
Insert the Pen (50 Demos)
Hand-to-Hand Retargeting
Web-based Interface